Detecting Transient Surface Features with Dynamic Landmarking
Motivation
We have developed methods to dynamically and autonomously detect
transient surface features, such as dust devil tracks or dark slope
streaks on Mars, from images. Most prior work on this subject has
relied on manual examination of image pairs. Exciting discoveries
of new surface features such as gullies and impact craters have been
made, usually serendipitously. How many more such features remain
undiscovered in the massive volume of images being collected and
returned?
Automated methods can help reduce the manual effort needed to find and
catalog new and interesting features. Previous techniques for
automated analysis have focused on changes at the pixel level. They
require an initial, sometimes slow, full registration between a
candidate pair of images. Once the images are registered, subtracting
one from the other yields changes. These are usually thresholded or
subjected to further analysis to help filter out noise and
other uninteresting "changes".
Dynamic Landmarking Approach
In contrast, our approach focuses on the image content, not just the
pixels. We first analyze each image to identify visually salient
"landmarks", and then compare the detected landmarks between the
images to highlight changes. No image registration is required. We
proceed as follows:
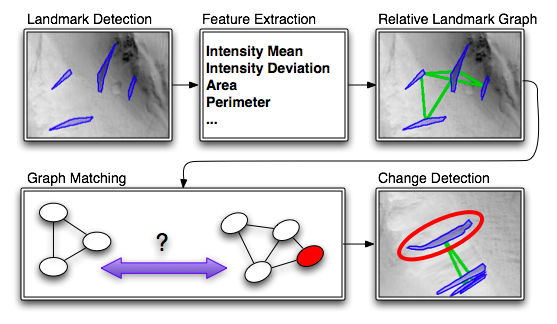
- Detect landmarks: Using statistical measures of salience, create a
"salience map" that indicates, for each pixel, how salient it is with
respect to its local region. Automatically select an appropriate
salience threshold, and use it to produce contours around regions of
high salience. Each such region becomes a "landmark." Landmarks may
include craters, volcanoes, fissures, and so on, as well as the
transient features we seek.
- Extract features: Compute descriptive attributes for each
landmark, such as size (surface area), shape, albedo, homogeneity, etc.
Using a trained landmark classifier, assign each discovered landmark
as one of a set of known classes of interest (craters, volcanoes, dust
devil tracks, gullies, etc.). Mark any unclassified landmarks as new,
potentially high-interest regions.
- Create a Relative Landmark Graph (RLG): Landmarks (and
their features) are the nodes, and edges connect each landmark to its
k nearest neighbors.
- Match the Graphs and Detect Changes: Compare the landmark
sets discovered in two images to quickly detect any changes with high
precision. Using the Munkres/Hungarian algorithm, compute a matching
between the RLGs from two images. Mark unmatched landmarks as changes.
|
We have applied this approach to images collected by the Mars Orbiter
Camera (MOC), Thermal Emission Imaging System (THEMIS), and other
Mars-orbiting spacecraft.
Benefits
- Because the landmarks are represented at an abstract level, it is
possible to combine observations from different instruments at
varying attitudes and under different illumination conditions.
- Dynamic landmarking can detect transient features without requiring
image registration, which represents a large step towards enabling the
onboard use of this technology.
- These landmarks provide a regional characterization of the area
covered by the image that can be used to better understand surface
processes as well as to recognize when two images overlap.
-
One of the biggest benefits of this effort is the increased
productivity it can lend to science investigations, as compared with
manual change detection. Our goal is to increase our
knowledge about other planetary surfaces, and the dynamic processes
present, to support future human and robotic exploration.
|
Funded by the NASA Applied
Information Systems Research Program, 2007-2010.
|
